|
避障技术,顾名思义就是无人机自主躲避障碍物的智能技术。无人机避障一直都是业界的难题,行业精英也尝试寻求解决之道。从避障技术发展历史来看,目前相对成熟的无人驾驶当仁不让。 无人驾驶汽车是一种智能汽车主要依靠车内的以计算机系统为主的智能驾驶仪来实现无人驾驶。其中无人驾驶主要原理为通过车载传感系统感知道路环境,自动规划行车路线并控制车辆到达预定目标;同时通过车载传感器感知周围环境,并根据感知所获得的道路、车辆位置和障碍物信息,控制车辆的转向和速度,从而使车辆能够安全、可靠地在道路上行驶。 由此可知无人驾驶依靠人工智能、计算视觉、雷达、监控装置和全球定位系统协同工作,让电脑可以在没有任何人类主动的操作下,自动安全地操作机动车辆。无人机避障也可以参考同样的理论,从无人驾驶方案也就很容易看出无人机避障方案,无人车的避障方案设计对无人机的避障具有极高的的参考价值。 无人机的飞行任务主要有三大要求: 其一,是飞行姿态的稳定性要求。空中机器人(即无人机)在执行任务过程中必须保持飞行轨迹平滑,高度基本不变,这也是对飞行器的基础要求; 其二,是对障碍物的精准识别及规避; 其三,要求无人机完成规避后恢复预定轨迹。 无人机避障技术可简单分为三个阶段: 一是感知障碍物并停止阶段; 二是获取障碍物深度图像自主绕开阶段; 三是建立区域地图合理规划路径阶段。
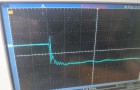
作为一个无人机的感官系统,实时性要求更高也是硬需求,考虑到未来无人机在飞行执行任务的过程中需要保持好的飞行状态,就需要极高的安全性和稳定性,这对传感器收集到的信号信息以及同时所涉及到的应用能够做实时处理的能力是一个关键点。这三个避障技术对应到几种传感器有:超声波、毫米波、激光红外、双目视觉、电子地图等。这几种避障方式技术原理不同,因此适用的场景也会因需而议。下面我们就来说说超声波传感器在无人机避障中的相关解决方案吧。 无人机降落辅助是无人机所具有的一项功能,可以检测无人机底部与着陆区域的距离,判定着陆点是否安全,然后缓慢下降到着陆区域。现在使用的无人机一般采用GPS监测、气压传感和其他传感技术实现自主导航,检测碰撞,定位等功能。而超声波传感则有助于无人机的着陆、悬停以及地面跟踪,将无人机保持在高于地面的恒定高度。 与许多超声波传感应用一样,无人机着陆辅助系统使用飞行时间(ToF)原理。ToF是从传感器发射到目标物体,然后从物体反射回传感器的超声波的往返时间估计。无人机的超声波传感器发出声波,发送后,信号处理路径变为静音,直到回波从物体反射回来为止。
现代很多传感技术可以检测物体的接近程度,而超声波传感在无人机着陆时的探测距离,不同表面的可靠性方面表现优异。超声波传感可以检测其他技术难以解决的的表面。例如,无人机经常会遇到玻璃面,透明薄膜,玻璃天顶等。光传感技术有时会穿过玻璃和其他透明材料,以至于数据偏差,而造成在玻璃建筑物上悬停失误。超声波却能可靠地反射出玻璃表面,从而准确降落。对于无人机中超声波传感器的应用工采网推荐MaxBotix 超声波避障传感器 - MB1043 MB1033。 超声波避障传感器MB1043 MB1033是一款高分辨率(1mm)、高精度低功耗的超声波传感器,它在设计上,不仅对干扰噪音做了处理,具备抗噪音干扰能力。而且对于大小不同的目标,和变化的供电电压,做了灵敏度的补偿。另外还具备标准的的内部温度补偿,使得测量出来的距离数据更加精准。应用于室内环境,它是一款很不错的低成本解决方案!
超声波避障传感器 MB1043 MB1033 特点: 体积小低成本方案 高分辨率可达1mm 可测距离长达5米 多种输出方式,包括脉宽、模拟电压、串口 低功耗适合电池供电系统,3.3伏供电仅有2.5mA电流 抗噪音 对大小变化的目标和工作电压各有补偿 标准内部温度补偿和可选的外部温度补偿 操作温度从0˚C + 65˚C 超声波避障传感器MB1043 MB1033 在HRLV-MaxSonar-EZ系列中的波束角选择
| 

 BLDC电机 DS和GS电压
BLDC电机 DS和GS电压 走进飞行时间传感技术
走进飞行时间传感技术 运用无人机超声波传感
运用无人机超声波传感 机载氧气传感器在航空
机载氧气传感器在航空 同仁们:你们的电子产
同仁们:你们的电子产 为什么每次烧录程序总
为什么每次烧录程序总 机器人应用的超声波传
机器人应用的超声波传 小白求助!!关于AD10
小白求助!!关于AD10 FCI推出专为远程油位
FCI推出专为远程油位 传感器在户外广告机排
传感器在户外广告机排 关于PFC,这文章讲的
关于PFC,这文章讲的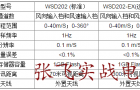 风速风向传感器在无人
风速风向传感器在无人


 发表于 2020-6-11 11:11:13
发表于 2020-6-11 11:11:13









 BLDC电机 DS和GS电压震荡
BLDC电机 DS和GS电压震荡 BLDC电机 DS和GS电压震荡
BLDC电机 DS和GS电压震荡 走进飞行时间传感技术揭秘TOF传感器工作原
走进飞行时间传感技术揭秘TOF传感器工作原 BLDC电机 DS和GS电压震荡
BLDC电机 DS和GS电压震荡 走进飞行时间传感技术揭秘TOF传感器工作原
走进飞行时间传感技术揭秘TOF传感器工作原


