|
随着机器人性能不断地完善,移动机器人的应用范围大为扩展,不仅在工业、农业、医疗、服务等行业中得到广泛的应用,而且在城市安全、国防和空间探测领域等有害与危险场合得到很好的应用。因此,移动机器人技术已经得到世界各国的普遍关注。 移动机器人(Robot)是一个集环境感知、动态决策与规划、行为控制与执行等多功能于一体的自动执行工作的机器装置综合系统,是一种在复杂环境下工作的,具有自行组织、自主运行、自主规划的智能机器人,它融合了传感器技术、信息处理、电子工程、计算机工程、自动化控制工程以及人工智能等多学科的研究成果,代表机电一体化的最高成就,是目前科学技术发展最活跃的领域之一。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或是危险的工作。 根据应用工作环境的不同移动机器人又可分为室内移动机器人(Indoor Mobile robot)和室外移动机器人(outdoor mobilerobot),今天工采网小编就来说说适用于室内移动机器人的最佳超声波传感器,以MaxBotix超声波传感器举例说明。 MaxBotix超声传感器的选择 工采网提供的MaxBotix超声波传感器是机器人社区中很受欢迎的一款产品,其优势在于以下几个方面: 1、与许多其他低成本替代品不同,工采网提供的传感器经过原厂校准,以最大限度地减少相同数量部件之间的性能差异。同时工采网提供广泛的产品线,涵盖尽可能多的应用,因此在客户选择传感器的时候,可以提供故障排除和定制产品设计方面的支持。 2、定制的固件和硬件设计帮助我们的传感器与客户的特定应用程序提供最佳匹配,另一个好处是,定制部件的用户可以选择批准和/或拒绝对其部件的任何固件或硬件更改。值得注意的是许多设计人员选择使用我们的标准传感器来创建他们的应用程序。在大容量应用程序中使用标准传感器确实需要了解传感器的操作。在考虑这些可能的限制时,设计人员必须预见到潜在的问题并编写程序来操作传感器。如果处理得当,可以将标准传感器成功地引入大容量应用程序。使用这种方法,许多设计人员已经在他们的应用程序中构建了我们的标准传感器,并取得了很好的效果。 3、在选择使用标准传感器时,为给定的应用程序选择产品线和传感器非常简单。 考虑移动机器人的避碰应用,小编将展示几款公司最受欢迎的产品线之间的主要差异:三种用于移动机器人避碰的传感器是HRLV-MaxSonar-EZ系列的超声波避障传感器MB1033,LV-MaxSonar-EZ系列的MB1030和XL-MaxSonar-EZ系列的MB1240。 这三种传感器安装方式相同。它们的特点是传感器和安装孔的位置相同。要注意的是,MB1240确实有一个变压器突出从后面的传感器,但在其他方面MB1030和MB1033安装是相同的。
超声波传感器波束模式是工厂设置 MaxBotix对每个传感器进行校准,以提供一致的波束模式和性能。光束模式的校准很重要,因为超声波换能器的机械特性会导致检测区域发生3到1的变化。因此,其他制造商的传感器在大容量应用中通常具有不一致的长期效果。 小侧面物体的检测与抑制 这三种传感器通常都能探测到4-5英尺以内的人。人一般检测在梁模式B(通常在B光束模式下检测人),这是1英寸直径的钉梁模式(这是一种1英寸直径的销型定位模式)。这些传感器往往能很好地工作,因为它们通常能很好地排除物体(这些传感器因为能够有效地抑制周边物体而表现优异)。(根据不同的应用,不同的产品可以提供人的长范围检测或短范围检测。) 超声波传感器安装补偿(和过温) 由于提供的传感器其设计的工作温度范围为-40°C至+ 65°C,但是对于大多数大批量应用客户而言,在客户的应用中验证在整个正常工作温度下的正常运行非常重要(尽管我们的传感器被设计在-40℃至+65℃的温度范围内都能正常工作,但是对于大多数应用来说,验证并确认一个合适的温度依然非常重要)。正确的测试以及根据传感器的安装选择适当的辅助安装材料,如泡沫插件和/或定制校准可以消除传感器安装中的大多数异常。从任何安装返回传感器的超声能量随温度变化而显着变化(传感器接收到的回波能量会因为温度的变化而显著变化)。来自传感器的超声波可以被困在底盘内部并反射到底盘内部并返回到传感器,从而在给定距离处产生反射。对于某些应用,传感器可能在室温下正常运行,但在环境温度低于0°C或温度高于50°C时,可以轻松检测内部机箱内的安装或功能。波长或超声波随温度而变化,这引起声音在靠近传感器的环境中的反应的相应变化,例如安装环境。因此,工采网技术人员建议在整个工作温度范围内测试所需的传感器,以验证操作是否正常。如果发现异常,选择最佳产品,泡沫插入物或固件更改可以帮助消除大多数问题。 超声波传感器工作温度过高 在所有大批量应用中,强烈建议在整个正常工作温度范围内验证是否正常运行。通过检测底盘或安装传感器,对温度进行适当的测试有助于识别任何潜在的异常情况。 MaxBotix传感器经过测试,可在-40°C至+ 65°C的整个温度范围内正常运行。 注意:每个传感器线路以不同的方式响应温度变化。 MB1033和MB1240传感器可在整个温度范围内自动正常运行,无需任何手动重新校准。 MB1030可以在上电后自动调节温度。这使传感器可以在任何温度下正常工作。如果传感器保持通电且温度下降或升高超过5°C,传感器可能无法正常运行,直到传感器重新通电。如果温度发生变化,我们建议移除并重新接通电源以重新校准传感器。 注意:重新校准传感器可使MB1030在广泛的电压、温度和安装范围内正常工作。 注意:用户必须能够重新为MB1030传感器供电,以重新校准传感器。 注意:MB1030传感器消耗的电流非常小,因此很多时候它可以通过数字微控制器引脚供电。 针对适用于室内移动机器人的最佳超声波传感器相关事项工采网小编先介绍到这里,后期关于传感器操作期间的超声波传感器自校准;传感器抑制连续噪声源;传感器在运行期间拒绝非连续噪声源;传感器到传感器串扰;分辨率和准确度;距离温度补偿;检测对象比最小报告范围更近;传感器概述等问题后期会继续更新有兴趣的小伙伴可以继续跟进哦。
| 

 BLDC电机 DS和GS电压
BLDC电机 DS和GS电压 走进飞行时间传感技术
走进飞行时间传感技术 运用无人机超声波传感
运用无人机超声波传感 机载氧气传感器在航空
机载氧气传感器在航空 同仁们:你们的电子产
同仁们:你们的电子产 为什么每次烧录程序总
为什么每次烧录程序总 机器人应用的超声波传
机器人应用的超声波传 小白求助!!关于AD10
小白求助!!关于AD10 FCI推出专为远程油位
FCI推出专为远程油位 传感器在户外广告机排
传感器在户外广告机排 关于PFC,这文章讲的
关于PFC,这文章讲的 风速风向传感器在无人
风速风向传感器在无人


 发表于 2019-3-6 10:56:44
发表于 2019-3-6 10:56:44






 BLDC电机 DS和GS电压震荡
BLDC电机 DS和GS电压震荡 BLDC电机 DS和GS电压震荡
BLDC电机 DS和GS电压震荡 走进飞行时间传感技术揭秘TOF传感器工作原
走进飞行时间传感技术揭秘TOF传感器工作原 BLDC电机 DS和GS电压震荡
BLDC电机 DS和GS电压震荡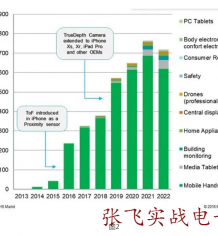 走进飞行时间传感技术揭秘TOF传感器工作原
走进飞行时间传感技术揭秘TOF传感器工作原


